Research
CoStream: Compositional Multi-Stream Framework for Multi-Modal Manipulation
Coming soon, under submission to RSS 2026
A composable foundation model combining a VLM planner, world model, and high-frequency reactive policy based on tactile and force-torque sensing. The multi-stream structure solves high-level planning and fine-grained manipulation skills at different levels, enabling long-horizon tasks with reactive correction behavior.
InvariantCloud: Globally Invariant Point Cloud Registration for High-Precision 6DoF Tactile Pose Tracking
ICRA 2026
[paper]
A framework for 6-DoF tactile object pose estimation using vision-based tactile sensors, leveraging globally invariant surface marker arrangements for one-shot point cloud registration — achieving sub-2° yaw tracking error and addressing cumulative drift in z-axis rotation estimation.
Dynamic Regrasping with Asynchronous Vision Feedback using a Minimalist Robotic System
ICRA RoboLetics 2.0 Workshop 2025
A minimalist dynamic regrasping approach that throws an object into a ballistic trajectory and regrasps using computed-torque control, refined with asynchronous visual feedback — demonstrating successful mid-air regrasping without high-speed vision or complex hardware.
Transferable Tactile Transformers for Representation Learning Across Diverse Sensors and Tasks
CoRL 2024
[project website] [arxiv] [code]
A tactile representation learned from multi-sensors and multi-tasks, and a tactile dataset containing over 3M tactile images collected from 13 sensors and 11 tasks.
TacLink: A Compact Multi-phalanx Finger with Vision-based Tactile Sensing and Proprioception
ICRA 2024
GelLink has three phalanges and two DOFs, actuated by only one motor and visualized by only one camera. A compact mechanism with a mirror-based tactile sensing system achieves a versatile multi-phalanx design with embedded tactile sensing and accurate proprioception.
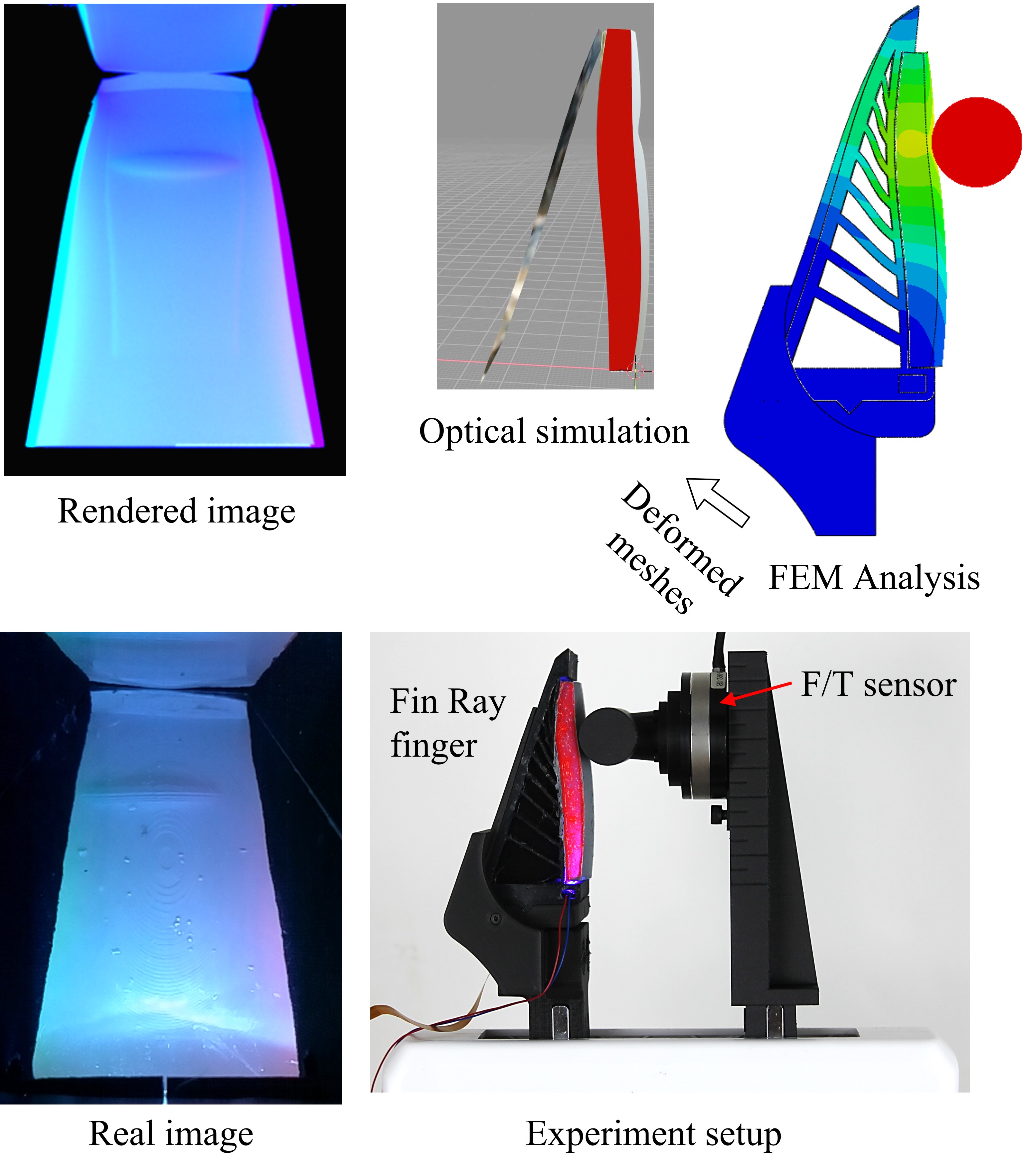

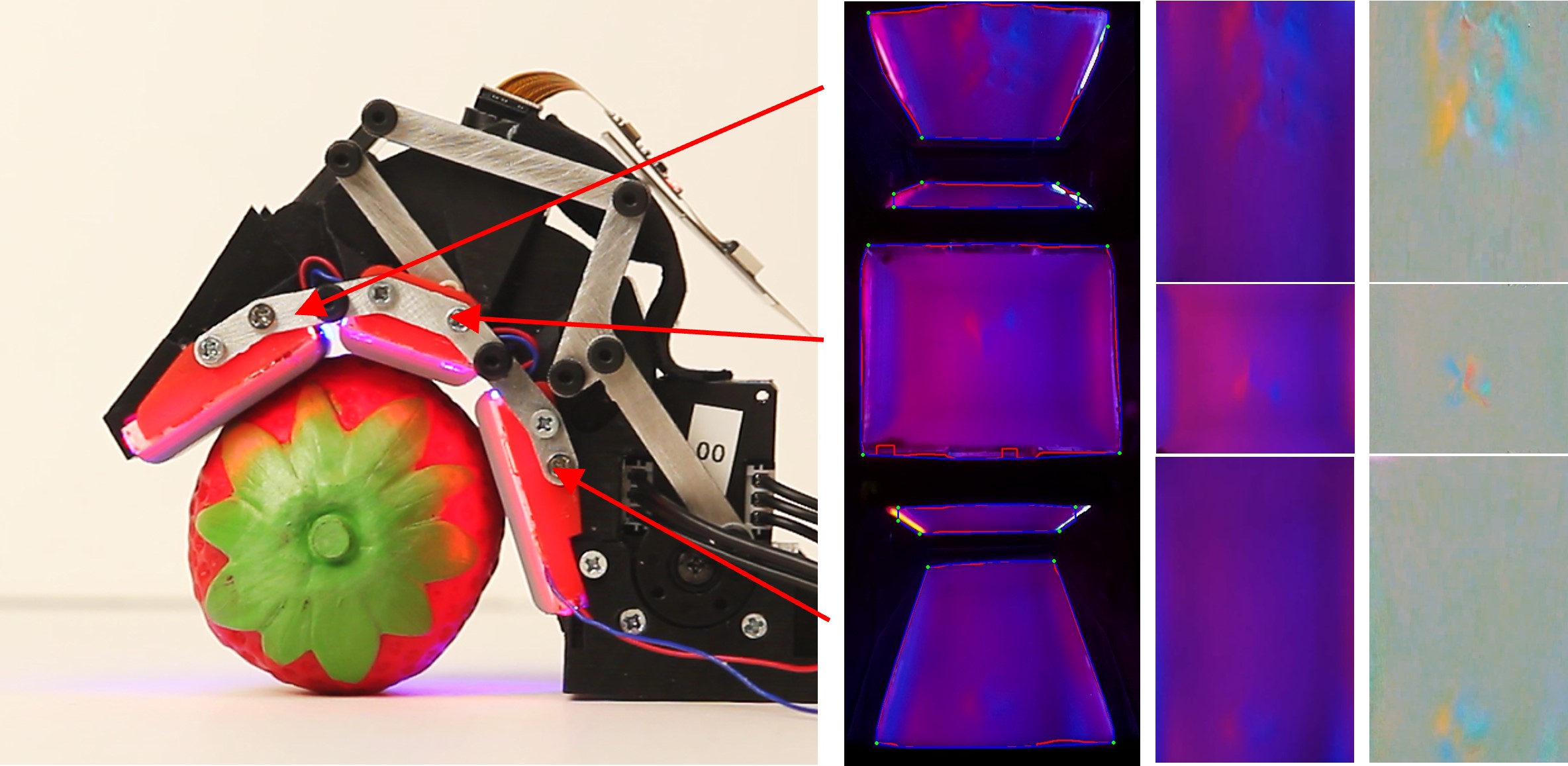
GelSight Baby Fin Ray: A Compact, Compliant, Flexible Finger with High-Resolution Tactile Sensing
RoboSoft 2023
Flexible mirrors and high-elongation silicone fluorescent paints incorporated into the GelSight Baby Fin Ray enable grasping through clutter and classification of in-shell nuts.
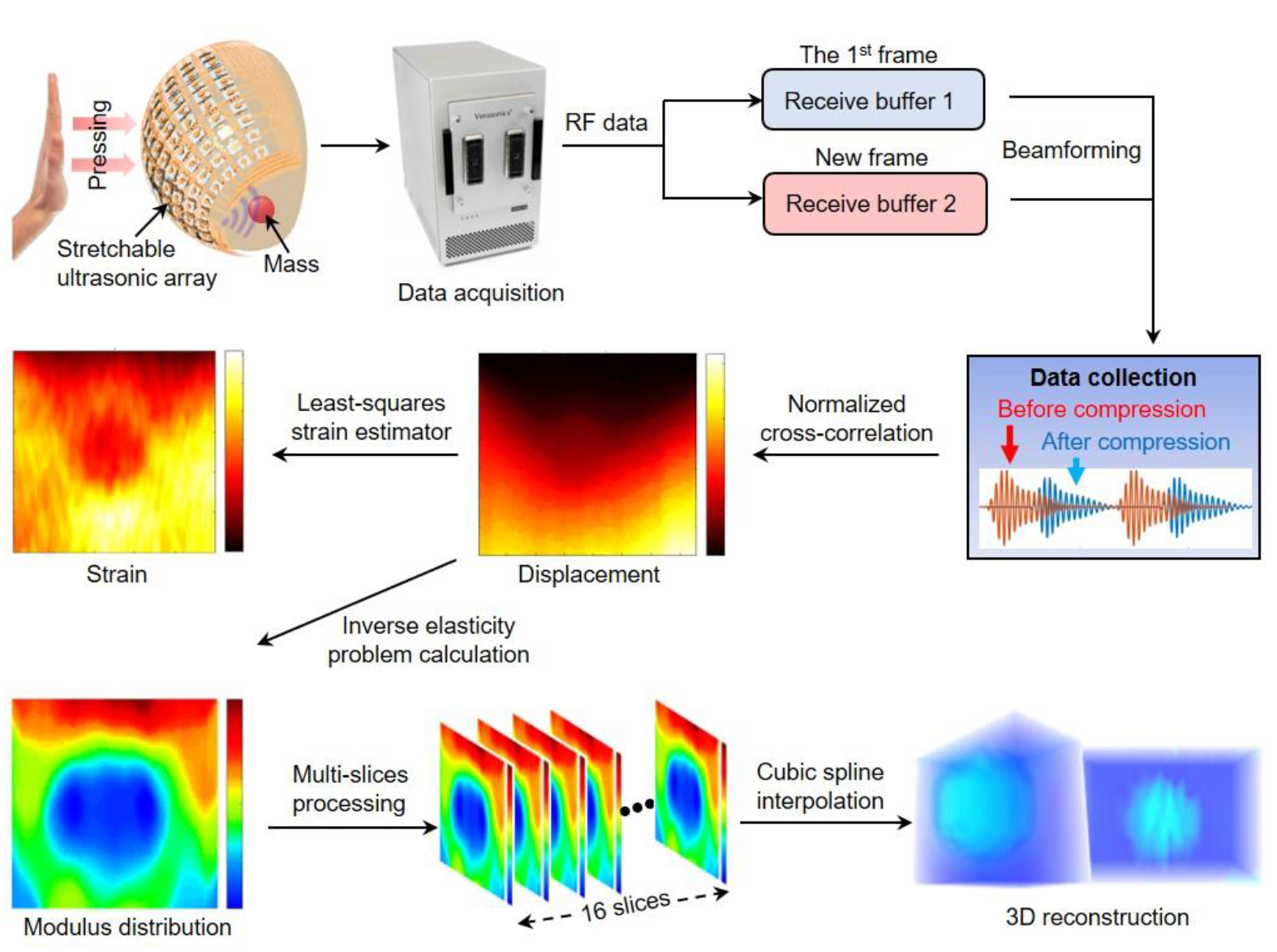
Stretchable ultrasonic arrays for the three-dimensional mapping of the modulus of deep tissue
Nature Biomedical Engineering 2023
[paper]
A stretchable ultrasonic array for serial non-invasive elastographic measurements of tissues up to 4 cm beneath the skin at 0.5 mm spatial resolution.
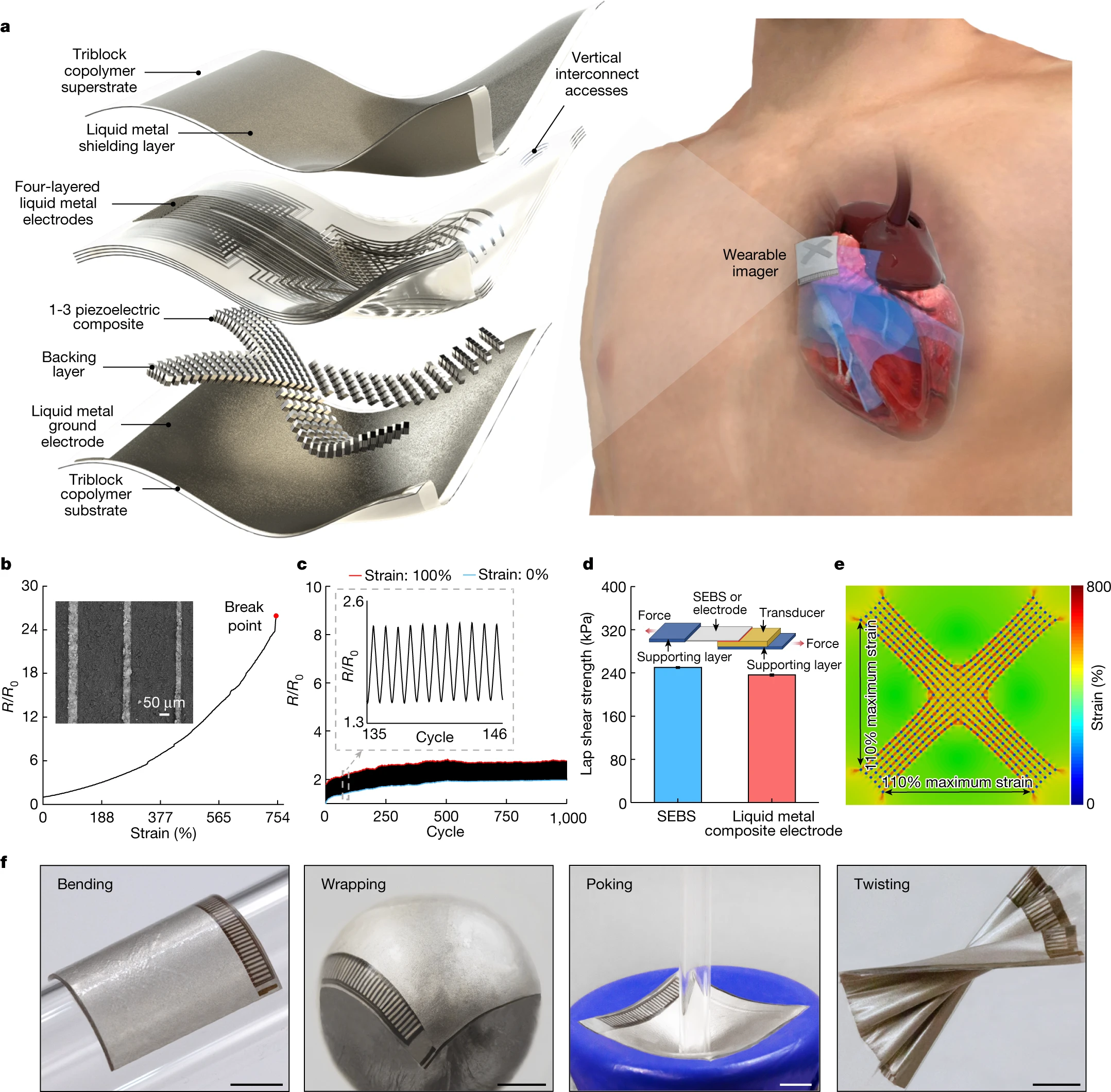
A wearable cardiac ultrasound imager
Nature 2023
[paper]
A wearable ultrasonic device for continuous, real-time cardiac function assessment using a deep learning model that automatically extracts left ventricular volume waveforms.
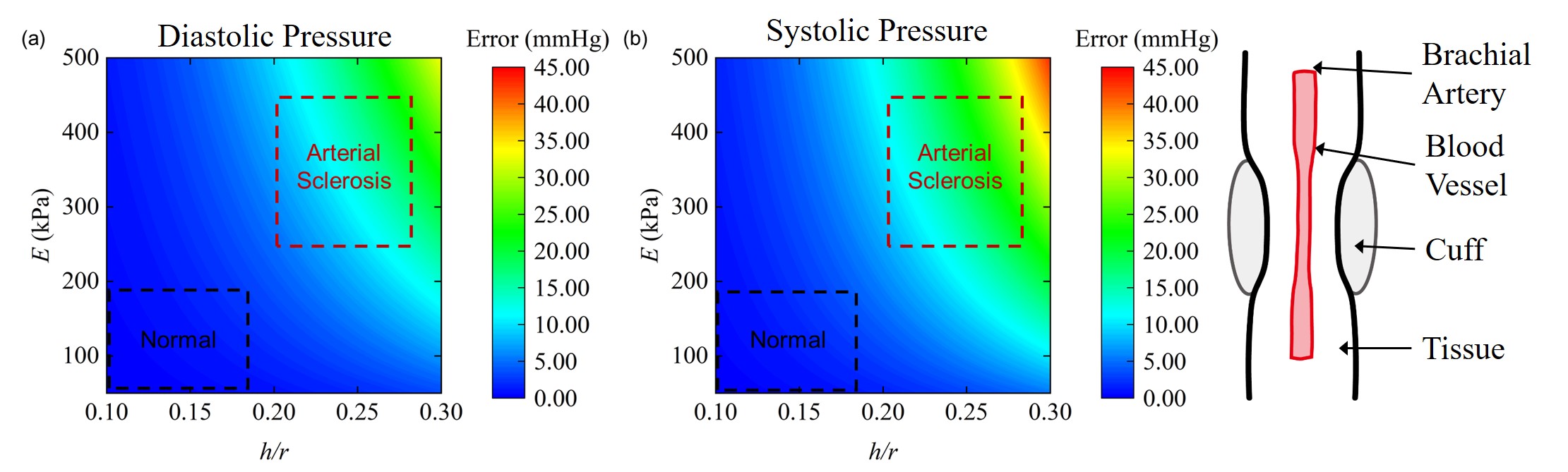
The effect of arterial stiffness on the accuracy of cuff-based blood pressure measurement
Extreme Mechanics Letters 2021
[paper]
A theoretical model studying the impact of arterial wall properties on non-invasive blood pressure measurement, revealing that arteriosclerotic patients' blood pressure may be overestimated.